Équilibre d’un solide soumis à trois forces non parallèles
1-Condition d’équilibre d’un solide soumis à trois forces :
1-Expérience :
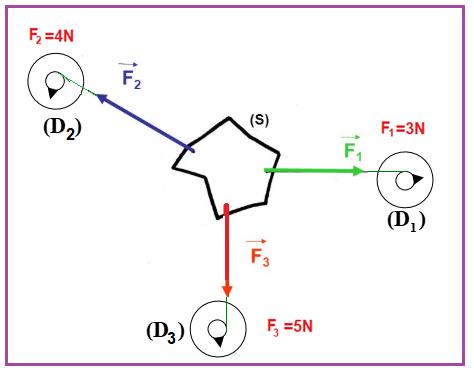
On étudie l’équilibre d’une plaque de masse négligeable.
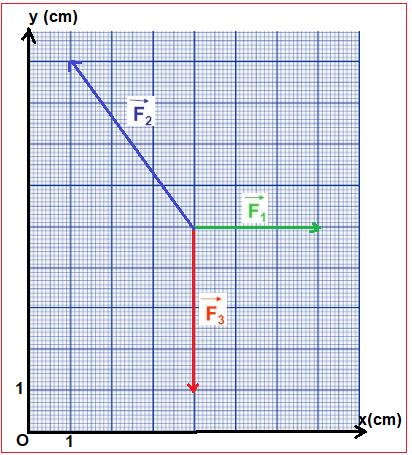
La plaque est soumis à l’action de trois forces \( \vec{F}_1, \vec{F}_2 \) et \( \vec{F}_3 \).
2-Observations :
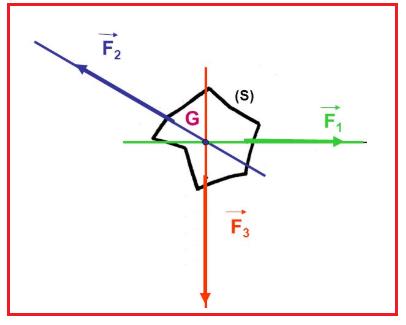
On constate que les trois forces \( \vec{F}_1, \vec{F}_2 \) et \( \vec{F}_3 \):
- Sont situées dans le même plan, on dit qu’elles sont coplanaires ;
- Se coupent en un même point O, on dit qu’elles sont concourantes.
3-Relation entre les vecteurs forces :
3-1-Méthode graphique :
En traçant le polygone des forces à une échelle choisie. On place l’origine d’un des vecteurs à l’extrémité de l’autre vecteur et on complète le triangle.
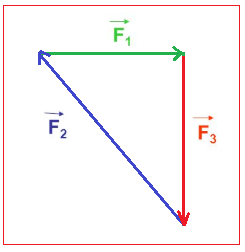
La ligne polygonale des trois forces est fermée traduit graphiquement la relation vectorielle :
\[\vec{F}_1 + \vec{F}_2 + \vec{F}_3 = 0\]
3-2-Méthode analytique :
Dans un repère orthonormé les coordonnées de chaque force sont :
\[\vec{F}_1 \begin{pmatrix} F_{1x} = 3 \\ F_{1y} = 0 \end{pmatrix} \quad \vec{F}_2 \begin{pmatrix} F_{2x} = -3 \\ F_{2y} = 5 \end{pmatrix} \quad \vec{F}_3 \begin{pmatrix} F_{3x} = 0 \\ F_{3y} = -5 \end{pmatrix} \]
La projection des trois forces sur l’axe Ox et Oy donne :
\[\begin{cases}
F_{1x} + F_{2x} + F_{3x} = 0 \\
F_{1y} + F_{2y} + F_{3y} = 0
\end{cases}\]
4-Condition d’équilibre :
Si un solide soumis à trois forces \( \vec{F}_1, \vec{F}_2 \) et \( \vec{F}_3 \) non parallèles est en équilibre :
- les trois forces sont coplanaires et concourantes.
- la somme vectorielle des trois forces est égale au vecteur nul : \( \vec{F}_1 + \vec{F}_2 + \vec{F}_3 = 0 \)
11-Force de frottement :
1-Expérience :
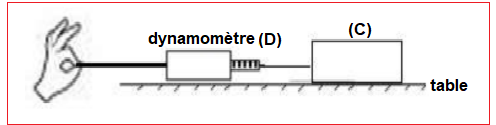
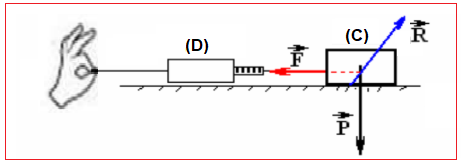
Sur une table horizontale, on place un corps (C) sur lequel on exerce une force \( \vec{F} \) à l’aide d’un dynamomètre (D), comme l’indique la figure.
On augmente successivement l’intensité de la force \( \vec{F} \) jusqu’à ce que le corps (C) se mette en mouvement.
2-Angle de frottement :
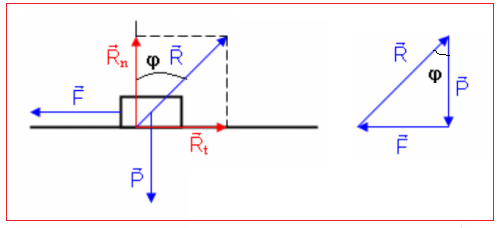
On constate que la réaction \( \vec{R} \) exercée par la table n’est pas perpendiculaire à la surface de contact, elle forme un angle \( \varphi \) avec la normale qu’on appelle angle de frottement.
On peut décomposer la réaction \( \vec{R} \) en deux composantes :
\( \vec{R}_N \) : La composante normale.
\( \vec{R}_T \) : La composante tangentielle qui s’appelle force de frottement \( \vec{f} \).
\[tan\varphi = \frac{R_T}{R_N}\]
On appelle le coefficient de frottement : \( k = tan\varphi \)
3-Angle de frottement statique :
Le corps (C) est en équilibre sous l’action de trois forces : \( \vec{F} \), \( \vec{R} \) et son poids \( \vec{P} \).
A cause de frottement le corps (C) reste en équilibre tant que la force \( \vec{F} \) est inférieure à une valeur minimale \( \vec{F}_m \).
- \( F < F_m \) le solide est en équilibre \( \varphi < \varphi_0 \) tel que \( \varphi_0 \) est l’angle de frottement statique.
- \( F > F_m \) le solide est en mouvement \( \varphi > \varphi_0 \).
On définit le coefficient de l’angle statique \( k_0 \) par la relation : \( k_0 = \tan{\varphi_0} \)
III-Exercice d’application :
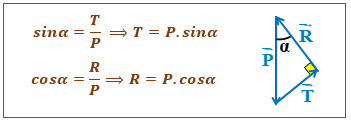
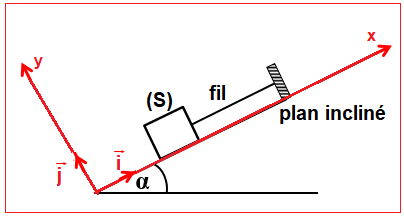
Un solide (S) est attaché à un fil inextensible sur un plan incliné faisant un angle \( \alpha \) avec l’horizontale (voir figure).
Le contact entre le plan incliné et le solide se fait sans frottements.
Déterminer les intensités des forces appliquées sur le solide (S).
On donne \( m = 500 \, g \, ; \, g = 10 \, N. \, kg^{-1} \) et \( \alpha = 30^\circ \).
Solution :
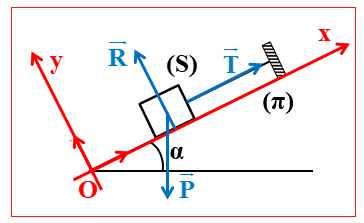
– système étudié : le corps (S)
– bilan des forces qui s’exercent sur le corps (S) :
\( \vec{R} \) : la réaction du plan incliné.
\( \vec{T} \) : la tension du fil.
\( \vec{P} \) : le poids du solide (S).
– Le solide (S) est en équilibre on écrit : \( \vec{R} + \vec{T} + \vec{P} = 0 \)
La projection des forces sur les axes Ox et Oy :
\[\begin{cases}
R_x + T_x + P_x = 0 \\
R_y + T_y + P_y = 0
\end{cases}\]
Les coordonnées des forces dans le repère \((O, i, j)\) sont :
\[\vec{R} \begin{cases}
R_x = 0 \\
R_y = R
\end{cases} \quad \vec{T} \begin{cases}
T_x = T \\
T_y = 0
\end{cases} \quad \vec{P} \begin{cases}
P_x = m.g.sin \alpha \\
P_y = m.g.cos \alpha
\end{cases}\]
\[\begin{cases}
0 + T + m.g.sin \alpha = 0 \\
R + 0 + m.g.cos \alpha = 0
\end{cases} \implies \begin{cases}
T = m.g.sin \alpha \\
R = m.g.cos \alpha
\end{cases}\]
A.N :
\[\begin{cases}
T = 0,5 \times 10 \times \sin(30^\circ) \\
R = 0,5 \times 10 \times \cos(30^\circ)
\end{cases} \implies \begin{cases}
T = 2,5 \, N \\
R = 4,33 \, N
\end{cases}\]
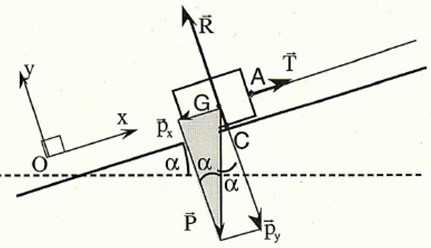
Remarque :
Les mêmes résultats sont obtenus en utilisant la méthode graphique.
\[\text{sin α } = \frac{T}{P} \implies T = P.\text{sin α }\]
\[\text{cos α } = \frac{R}{P} \implies R = P.\text{cos α }\]