Principe d’inertie
I–Effet d’une force sur un mouvement :
Une force qui s’exerce sur un corps peut modifier son mouvement, sa trajectoire ou sa vitesse.
Exemples :
– La force exercée par le pied sur un ballon a pour effet la mise en mouvement du ballon.
– Le ballon rebondit sur le mur : la force exercée par le mur sur le ballon dévie la trajectoire et sa vitesse du ballon.
II–Centre d’inertie d’un corps solide :
1–Système isolé et système pseudo-isolé :
1–1–Système isolé :
Un système est mécaniquement isolé s’il n’est soumis à aucune force.
1–2–Système pseudo-isolé :
Un système est pseudo-isolé si les effets des forces extérieures auxquelles il est soumis se composent. C’est-à-dire la somme vectorielle des forces extérieures est nulle : \( \sum \vec{F}_{ext} = \vec{0} \)
Exemple :
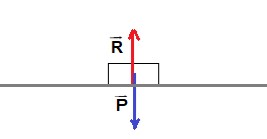
– L’autoporteur sur la table à coussin d’air \( \vec{R} \) horizontale (lorsque la soufflerie fonctionne) est un système isolé car il est soumis à deux forces \( \vec{R} \) et \( \vec{P} \) qui se composent. \( \vec{R} + \vec{P} = \vec{0} \)
2–Centre d’inertie :
2–1–Activité expérimentale :
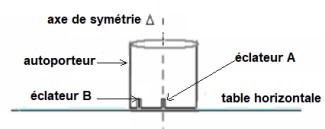
On utilise un autoporteur équipé de deux éclateurs le premier A fixé sur son axe de symétrie et le deuxième B est fixé en un point de sa partie inférieure.
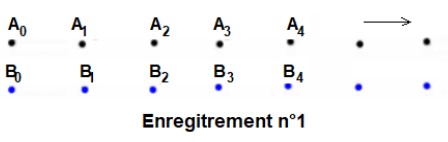
• Expérience n°1 :
On lance un autoporteur (S) sans rotation sur une table à coussin d’air horizontal et on obtient l’enregistrement 1.
• Expérience n°2 :
On lance un autoporteur (S) avec rotation sur une table à coussin d’air horizontal et on obtient l’enregistrement 2.
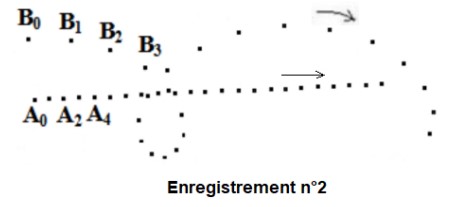
• Observations :
– Le point A a une trajectoire rectiligne dans les deux expériences.
– Le point B a une trajectoire rectiligne dans l’expérience n°1 et une trajectoire curviligne dans l’expérience n°2.
• Conclusion :
Le point A appartient à l’axe de symétrie de l’autoporteur (S) contient aussi le point G le centre de gravité de (S).
Le point A présente la projection orthogonale du point G ainsi le mouvement du point G est celui du point A.
2–2–Résumé :
Chaque solide a un point spécial et unique appelé centre d’inertie noté G.
Lorsque ce corps est pseudo-isolé mécaniquement pour un référentiel terrestre, son point G est en mouvement rectiligne uniforme.
4–Énoncé de la loi d’inertie :
Dans un référentiel Galiléen, le centre d’inertie G d’un système isolé (ou pseudo-isolé) est :
Soit immobile : \( \vec{V} = \vec{0} \)
Soit en mouvement rectiligne uniforme : \( \vec{V} = \text{constante} \)
Remarques :
– Le principe d’inertie ne s’applique que dans un référentiel Galiléen (comme le référentiel de Copernic).
Le référentiel terrestre peut être considéré comme galiléen (pour les mouvements de courtes durées).
– Lorsqu’un système est mécaniquement isolé (ou pseudo-isolé) c’est le centre d’inertie qui est le seul point sur lequel s’applique le principe d’inertie, donc le mouvement global d’un corps est celui de son centre d’inertie.
III–Le centre d’inertie d’un système :
1–Relation barycentrique :
Deux corps \( (S_1) \) et \( (S_2) \) de masses \( m_1 \) et \( m_2 \) et de centres d’inertie \( G_1 \) et \( G_2 \) liés entre eux, constituent un solide \( (S) \) de masse \( m = m_1 + m_2 \).
Ce solide \( (S) \) a un centre d’inertie G se trouvant sur le segment \( [G_1G_2] \), tel que :
\( m_1 \overrightarrow{GG_1} + m_2 \overrightarrow{GG_2} = \vec{0} \)
Soit O un point quelconque de l’espace choisi comme origine, on écrit :
\( m_1 (\overrightarrow{GO} + \overrightarrow{OG_1}) + m_2 (\overrightarrow{GO} + \overrightarrow{OG_2}) = \vec{0} \)
\( m_1 \overrightarrow{OG_1} + m_2 \overrightarrow{OG_2} + (m_1 + m_2) \overrightarrow{GO} = \vec{0} \)
\( m_1 \overrightarrow{OG_1} + m_2 \overrightarrow{OG_2} = -(m_1 + m_2) \overrightarrow{GO} \)
\( m_1 \overrightarrow{OG_1} + m_2 \overrightarrow{OG_2} = (m_1 + m_2) \overrightarrow{OG} \)
\( \overrightarrow{OG} = \frac{m_1 \overrightarrow{OG_1} + m_2 \overrightarrow{OG_2}}{m_1 + m_2} \)
2–Généralisation :
Pour un solide constitué d’un ensemble de solides, la relation barycentrique s’écrit :
\( \overrightarrow{OG} = \frac{\sum m_i \overrightarrow{OG_i}}{\sum m_i} \)
G : centre d’inertie du solide et m sa masse.
Application :
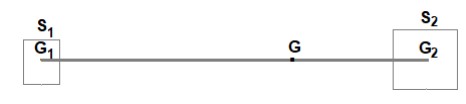
On considère un système de deux corps \( (S_1) \) et \( (S_2) \) de masses respectivement \( m_1 \) et \( m_2 \) tel que \( m_1 = 2m_2 \).
Les deux corps sont liés par une liaison rigide de masse négligeable (voir schéma).
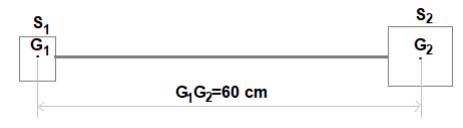
La distance entre \( G_1 \) (centre d’inertie de \( (S_1) \)) et \( G_2 \) (centre d’inertie de \( (S_2) \)) est \( G_1G_2 = 90 \) cm.
– Déterminer le centre d’inertie G du système \( S = \{S_1 + S_2\} \).
Solution :
On applique la relation du barycentrique pour déterminer le centre d’inertie G du système S :
\( \overrightarrow{OG} = \frac{\sum m_i \cdot \overrightarrow{OG_i}}{\sum m_i} \)
\( \overrightarrow{OG} = \frac{m_1 \cdot \overrightarrow{OG_1} + m_2 \cdot \overrightarrow{OG_2}}{m_1 + m_2} \) (1)
On considère le point O confondu avec le point \( G_1 \), la relation (1) s’écrit :
\( \overrightarrow{G_1G} = \frac{m_1 \cdot \overrightarrow{G_1G_1} + m_2 \cdot \overrightarrow{G_1G_2}}{m_1 + m_2} \)
\( \overrightarrow{G_1G} = \frac{m_2 \cdot \overrightarrow{G_1G_2}}{m_1 + m_2} \)
\( \overrightarrow{G_1G} = \frac{m_2 \cdot G_1G_2}{m_1 + 2m_1} = \frac{2}{3} G_1G_2 \)
\( G_1G = \frac{2 \times 60}{3} = 40 \) cm