La projection dans le plan
1. Projection sur une droite parallèlement à une autre droite
Définition
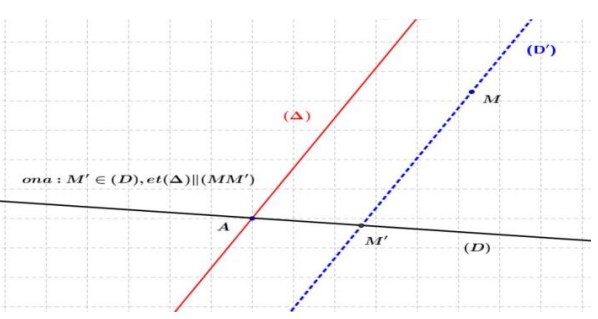
Soient \( (D) \) et \( (\Delta) \) deux droites sécantes en un point A, et soit M un point du plan :
- La droite passant par M et parallèle à \( (\Delta) \) coupe \( (D) \) en M’
- M’ est appelé projection de M sur \( (D) \) parallèlement à \( (\Delta) \)
La droite \( (\Delta) \) est appelée direction de la projection.
Si \( B \in (D) \) alors \( P(B) = B \) : le point B est invariant par la projection.
2. Propriétés des projections
- Tout point de \( (D) \) est confondu avec sa projection
- L’image du segment [AB] est le segment [A’B’] : \( P([AB]) = [A’B’] \)
- La projection conserve les milieux
Cas particulier : Projection orthogonale
Si \( (D) \perp (\Delta) \), alors M’ est la projection orthogonale de M sur \( (D) \).
3. Théorème de Thalès
Hypothèses :
- \( (D) \) et \( (\Delta) \) droites sécantes
- A, B, C points alignés avec \( (AB) \nparallel (\Delta) \)
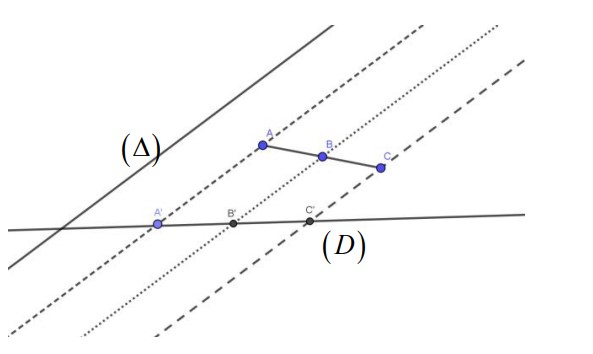
Propriétés :
Exemple
Soit \( ABCD \) un parallélogramme
et soit \( J \) un point du plan tel que \( \overrightarrow{AJ} = \frac{2}{3} \overrightarrow{AC} \)
et \( E \) le projeté du point \( J \) sur la droite \( (BC) \) parallèlement à la droite \( (AB) \)
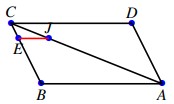
- Montrons que \( \overrightarrow{BE} = \frac{2}{3} \overrightarrow{BC} \)
Soit \( p \) la projection sur la droite \( (BC) \) parallèlement à la droite \( (AB) \)
On a \( p(A) = B \), \( p(J) = E \) et \( p(C) = C \)
Puisque \( \overrightarrow{AJ} = \frac{2}{3} \overrightarrow{AC} \) et la projection conserve le milieu de colinéarité
Alors \( \overrightarrow{BE} = \frac{2}{3} \overrightarrow{BC} \)
- En déduisons que \( \overrightarrow{JE} = \frac{1}{3} \overrightarrow{AB} \)
On a \( \overrightarrow{BE} = \frac{2}{3} \overrightarrow{BC} \) et \( \overrightarrow{AJ} = \frac{2}{3} \overrightarrow{AC} \)
Alors \( \overrightarrow{CE} = \frac{1}{3} \overrightarrow{CB} \) et \( \overrightarrow{CJ} = \frac{1}{3} \overrightarrow{CA} \)
Par suite
\( \overrightarrow{JE} = \overrightarrow{JC} + \overrightarrow{CE} \)
\(= -\frac{1}{3} \overrightarrow{CA} + \frac{1}{3} \overrightarrow{CB}\)
\(= \frac{1}{3} \left( -\overrightarrow{CA} + \overrightarrow{CB} \right)\)
\(= \frac{1}{3} \left( \overrightarrow{AC} + \overrightarrow{CB} \right)\)
\( \overrightarrow{JE} = \frac{1}{3} \overrightarrow{AB} \)
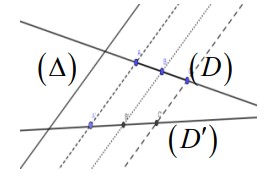
4. Théorème réciproque de Thalès
Hypothèses :
- \( (D) \) et \( (D’) \) non parallèles à \( (\Delta) \)
- A, B ∈ \( (D) \) avec A’, B’ leurs projections sur \( (D’) \)
- C ∈ \( (D) \) et C’ ∈ \( (D’) \) avec :
\[ \frac{A’B’}{AB} = \frac{A’C’}{AC} \] - Points dans le même ordre sur \( (D) \) et \( (D’) \)
Conclusion :
C’ est la projection de C sur \( (D’) \) parallèlement à \( (\Delta) \) et :
\[ (AA’) // (BB’) // (CC’) \]