⚡ MOUVEMENT DE ROTATION
Corps solide autour d’un axe fixe – 1er Bac Sciences
Repérage · Rotation & translation circulaire
1‑1 Activité – Mouvements de translation / rotation
Parmi les corps solides en mouvement représentés ci-dessus:
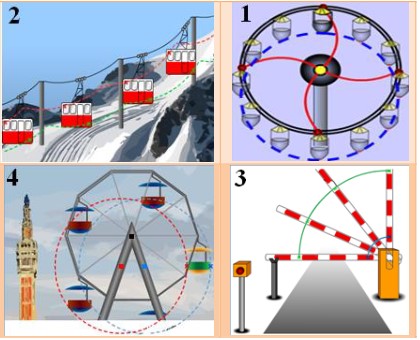
a. Les nacelles dans les figures 1 et 3 ont un mouvement de translation circulaire ; la nacelle de la figure 2 a un mouvement de translation curviligne.
b. Le bras dans la figure 3 a un mouvement de rotation autour d’un axe fixe.
c. Tous les points du bras de la grande roue (figure 4) ont des trajectoires circulaires centrées sur l’axe fixe.
d. Le bras réalise une rotation, tandis que la nacelle est en translation circulaire : chaque segment de la nacelle garde la même direction.
1‑2 Conclusion
Un solide indéformable est en rotation autour d’un axe fixe si chaque point décrit un cercle centré sur cet axe, et la trajectoire appartient au plan orthogonal à l’axe.
1‑3 Rotation vs translation circulaire
Dans la grande roue, la roue tourne autour de l’axe fixe Δ ; les nacelles sont en translation circulaire car chaque segment AB garde une direction constante \(\overrightarrow{AB} = \overrightarrow{Ct}\) et chaque point suit un cercle de centre différent.
2 – Repérage d’un point G
Dans un repère orthonormé \(\mathcal{R}(O,\vec{i},\vec{j},\vec{k})\), le vecteur position est :
Abscisse angulaire θ(t)
Valeur algébrique de l’angle \(\theta(t) = (\overrightarrow{OX},\overrightarrow{OG})\) (unité : radian).
Abscisse curviligne s(t)
Valeur algébrique de la distance \(s(t) = \overline{AG}\) (unité : mètre).
Vitesse angulaire · Lien avec la vitesse linéaire
2‑1 Activité – Autoporteur
On considère le système {autoporteur + détonateur latéral} comme un solide en rotation autour d’un axe fixe (D). Cet axe appartient à la pièce métallique et passe par son centre de gravité.
On veille à ce que le détonateur central A, le détonateur latéral B et l’axe (D) soient alignés.
On lance le solide et on enregistre le mouvement des points A et B pendant des intervalles de temps égaux et successifs, de durée t = 40 ms, comme l’illustre l’enregistrement ci-contre
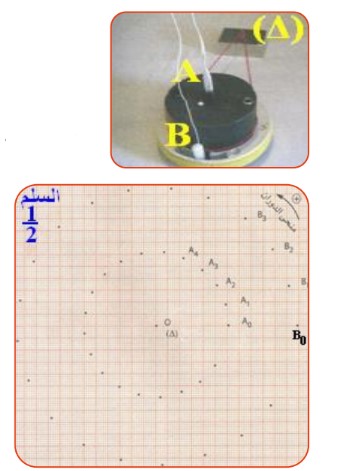
a. Points A et B : mouvement circulaire de centre O (OA et OB constants).
b. Sur des durées égales τ = 40 ms :
\(A_1A_2 = A_2A_3 = … = 1,8\) cm → \(V_A\) constante.
\(B_1B_2 = B_2B_3 = … = 3,6\) cm → \(V_B\) constante.
c. On trouve \(V_A = 0,45\ \text{m·s}^{-1}\) et \(V_B = 0,85\ \text{m·s}^{-1}\). Plus on s’éloigne de l’axe, plus la vitesse linéaire est grande.
d. Les angles balayés \(\Delta\theta_A = \Delta\theta_B = 34°\) (0,6 rad) pendant \(\Delta t = 80\) ms.
\(\omega_A = \dfrac{0,6}{2 \times 40 \cdot 10^{-3}} = 7,5\ \text{rad·s}^{-1}\) et \(\omega_B = 7,5\ \text{rad·s}^{-1}\).
✅ Tous les points du solide ont la même vitesse angulaire ω.
f. Le mouvement est uniforme (ω constante).
g. Avec \(R_A = 6·10^{-3}\) m et \(R_B = 12·10^{-3}\) m :
\(R_A \cdot \omega_A = 0,45\ \text{m·s}^{-1} = V_A\) et \(R_B \cdot \omega_B = 0,9\ \text{m·s}^{-1} \approx V_B\).
➜ Relation fondamentale : \(V_i = R_i \cdot \omega\) à chaque instant.
2‑2 Vitesse angulaire moyenne
2‑3 Vitesse angulaire instantanée
2‑4 Relation vitesse angulaire / vitesse linéaire
Équation horaire du mouvement
Pour un mouvement de rotation uniforme autour d’un axe fixe :
- \(\theta_0\) : abscisse angulaire à \(t=0\)
- \(S_0\) : abscisse curviligne à \(t=0\)
Comme \(\omega = \dfrac{\Delta\theta}{\Delta t}\) et \(\Delta t = t – 0\) :
Rappel : \(S(t) = r \cdot \theta(t)\) et \(V = r \cdot \omega\)
📌 Synthèse – Rotation autour d’un axe fixe
• Repérage : abscisse angulaire θ(t) et curviligne s(t) = r·θ(t).
• Vitesse angulaire : ω (rad·s⁻¹) ; identique pour tous les points du solide.
• Lien V–ω : \(V = r \cdot \omega\) (la vitesse linéaire dépend de la distance à l’axe).
• Mouvement uniforme : θ(t) = ω·t + θ₀ (ω constante).
• Translation circulaire : chaque point suit un cercle, mais les segments gardent leur direction.